Max Arm
Il braccio robotico Hiwonder MaxArm Open Source alimentato da ESP32 supporta l’apprendimento della cinematica inversa della programmazione Python e Arduino
Descrizione prodotto
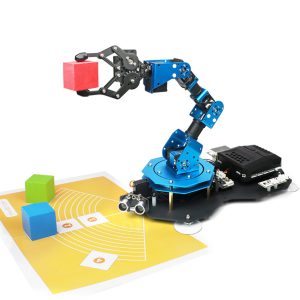
MaxArm è un braccio robotico open source alimentato dal microcontrollore ESP32. Il corpo progettato con meccanismo di collegamento è dotato di servi bus di alta qualità e ugello di aspirazione. Utilizzando la tecnologia della cinematica inversa, MaxArm può eseguire una varietà di attività come lo smistamento degli oggetti, il prelievo, il trasporto e l’impilamento.
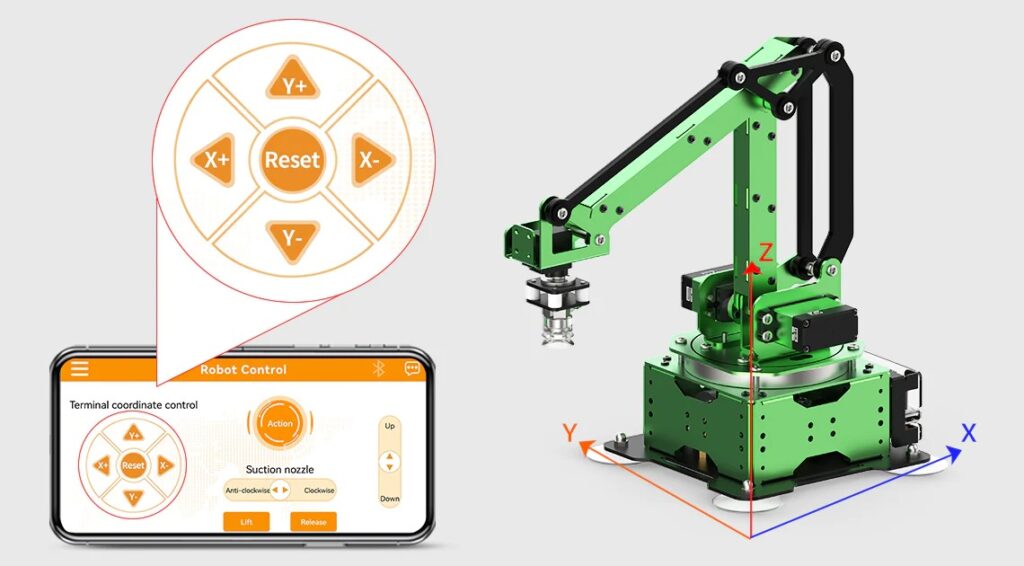
Supportando la programmazione Python e Arduino e le comunicazioni Wi-Fi e Bluetooth, MaxArm può anche essere controllato da APP, software per PC, telecomando wireless e controllo del mouse. Supporta anche una varietà di sensori per trasformare in realtà le tue idee creative di intelligenza artificiale!
- Alimentato dal microcontrollore ESP32
- Meccanismo di collegamento per un migliore apprendimento della cinematica inversa
- Compatibile con i sensori Hiwonder per l'implementazione di diverse attività
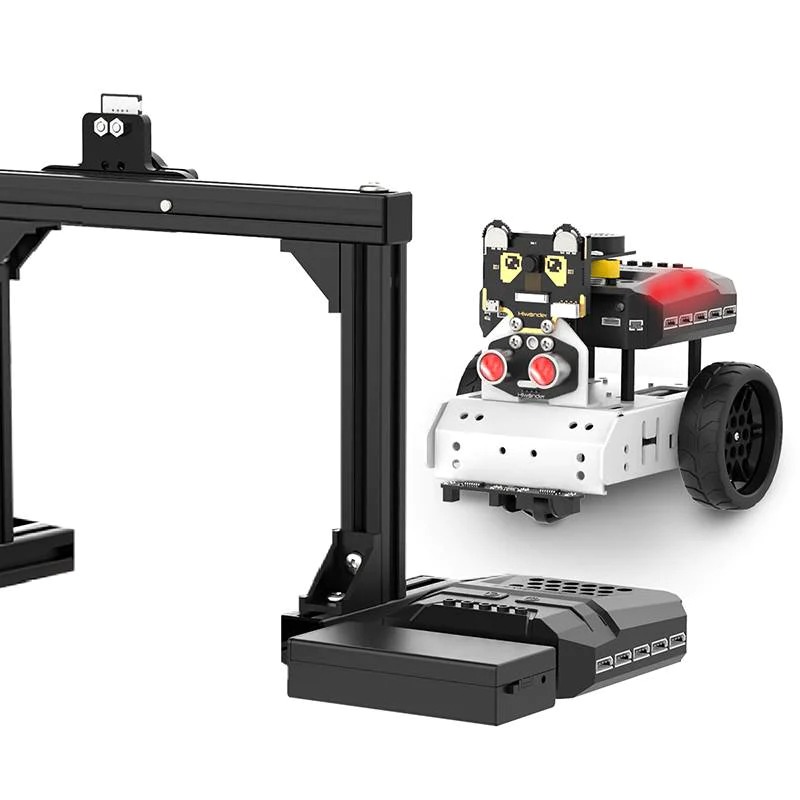
- Lavorato con il binario scorrevole per simulare uno scenario industriale
- Supporta Arduino e Python
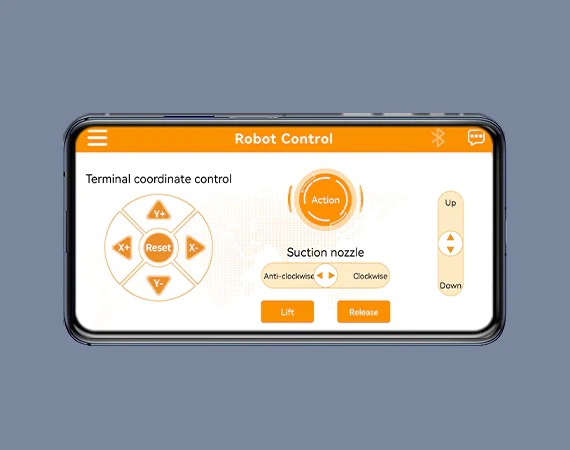
- Supporta APP, software per PC, maniglia wireless e controlli del mouse
Migliora l'efficienza
Utilizzando il corpo progettato per il meccanismo di collegamento, MaxArm migliora notevolmente l’efficienza delle articolazioni in modo da consentire di muoversi lungo gli assi x-y-z.
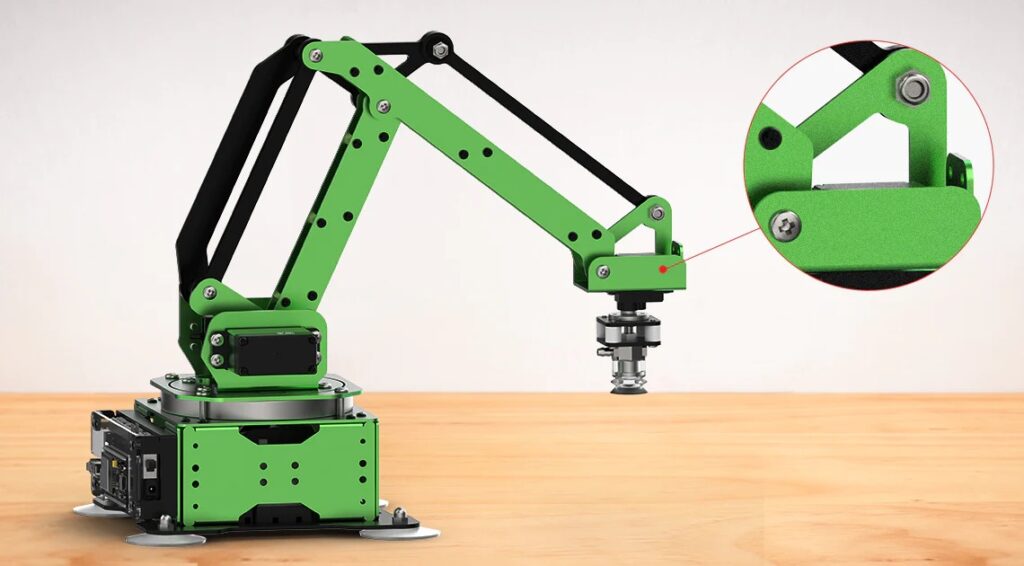
Design strutturale compatto
Realizzato in lega di alluminio duro e fibra di carbonio per alta qualità. I cuscinetti in metallo per un movimento articolare più fluido e preciso. Il design compatto rende il corpo piccolo e flessibile.
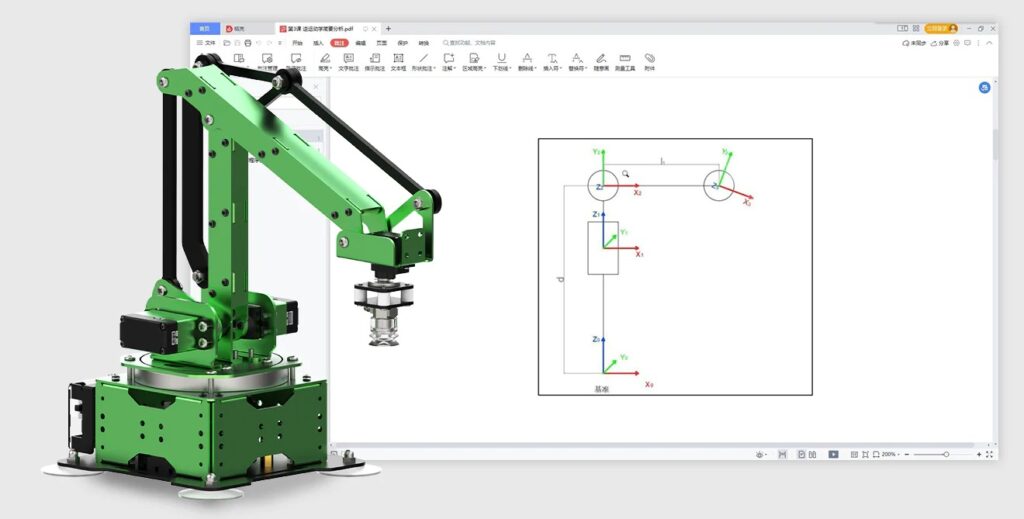
Algoritmo di cinematica inversa, regolazione libera
Fornire il diagramma del sistema di coordinate di collegamento
Sulla base della piattaforma di sviluppo ESP32, sono disponibili l’analisi della cinematica inversa e il modello DH di MaxArm, che consente di comprendere a fondo il principio di funzionamento di MaxArm.
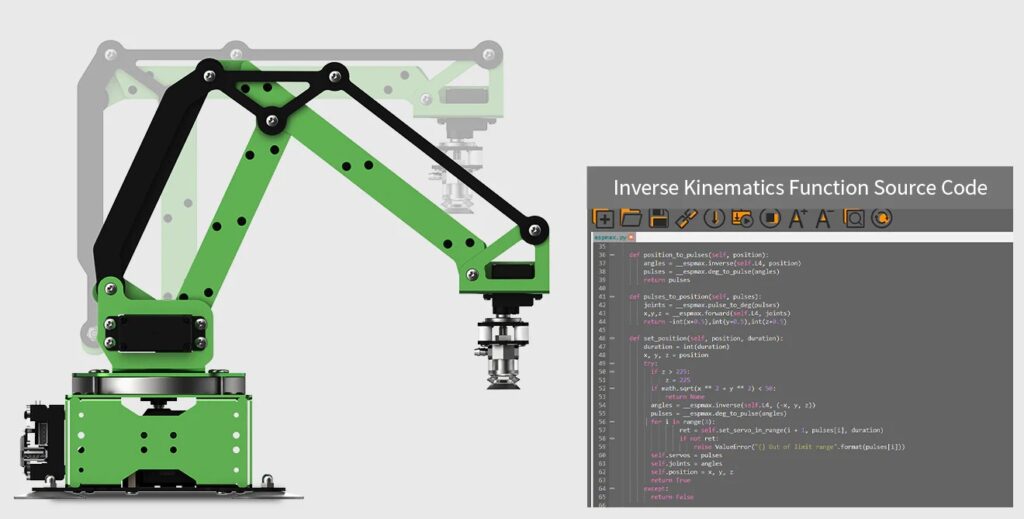
Soluzione di inversione del collegamento, controllo facile
Inserendo le coordinate dell’effettore finale, la cinematica inversa può calcolare l’angolo di ciascun servo per facilitare il debugging dell’azione. (Fornire il codice sorgente della funzione di cinematica inversa)
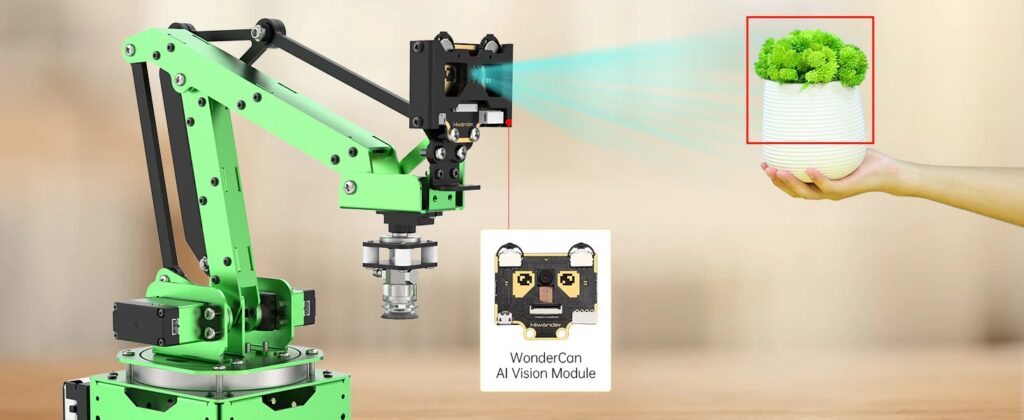
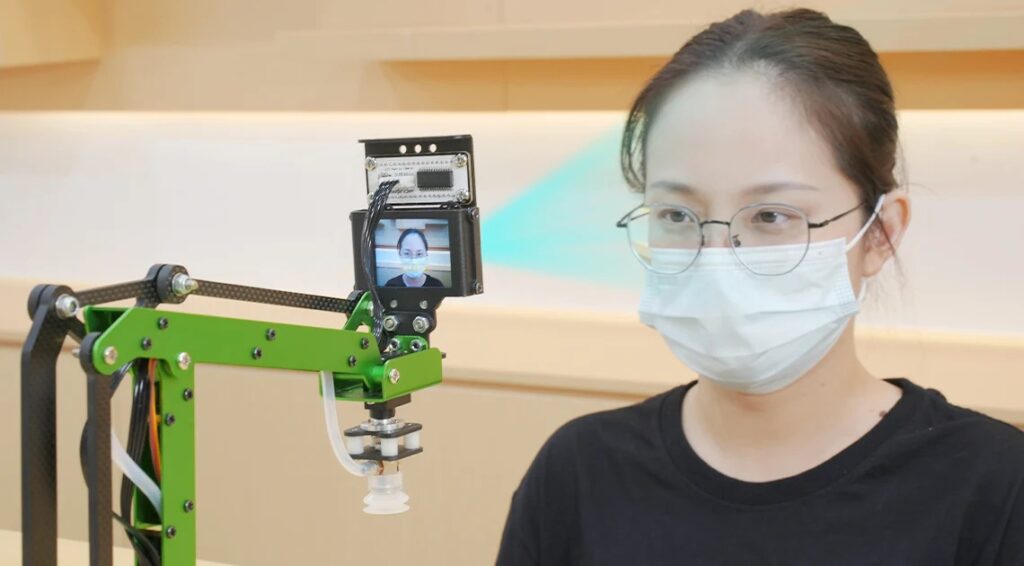
Estensione del modulo di visione AI
Dotato del modulo di visione WonderCam AI, MaxArm può implementare diverse attività di riconoscimento e tracciamento con un addestramento con un clic. Collaborato con ventola, matrice di punti e altri moduli elettronici, sono coinvolti giochi più divertenti come ventola AI, riconoscimento maschera, tracciamento colore, raccolta differenziata.



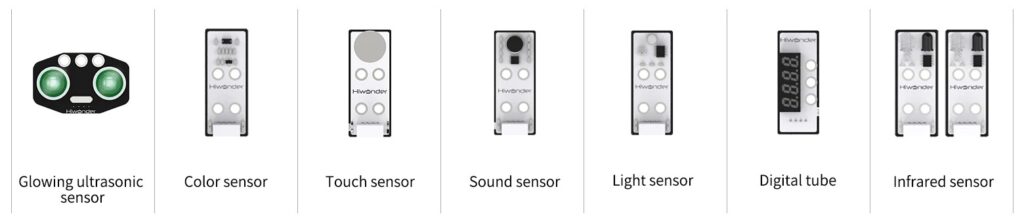
Estensione del modulo di visione AI
Compatibile con il sensore a ultrasuoni luminoso, il sensore a infrarossi, il sensore di colore, il sensore tattile e altri moduli elettronici, MaxArm converte le idee più creative in realtà!
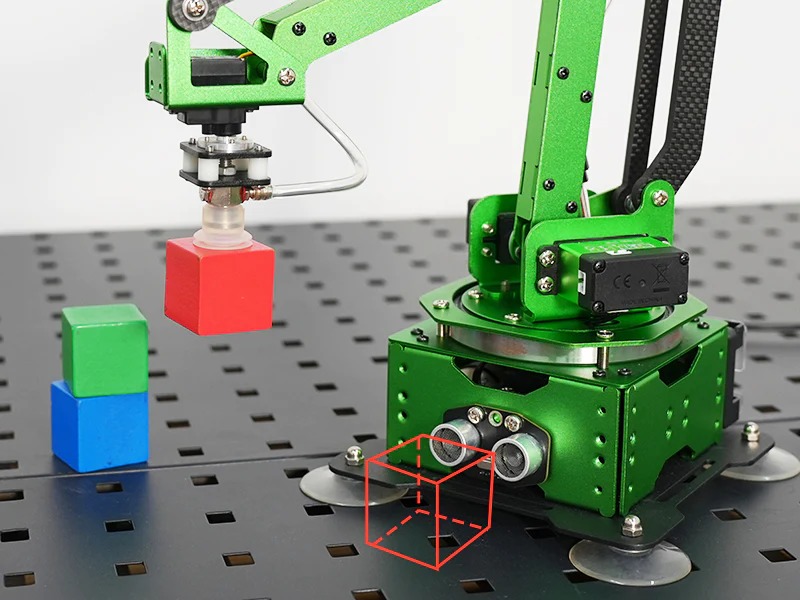
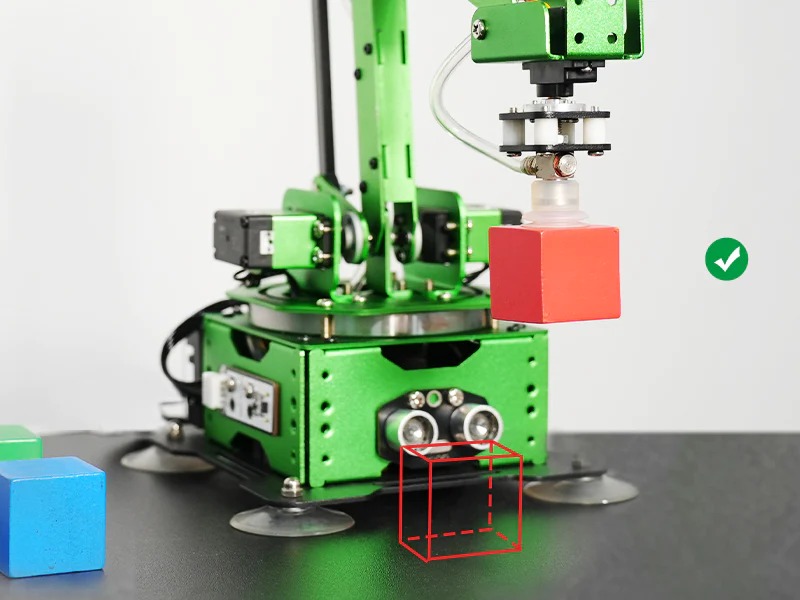
Rilevamento e impilamento ad ultrasuoni
Con il sensore a ultrasuoni, MaxArm può eseguire l’impilamento intelligente dopo aver rilevato i blocchi.
Rilevamento tocco e posizionamento
Con il sensore tattile, MaxArm può prendere, sollevare e posizionare i blocchi nelle posizoni stabilite.
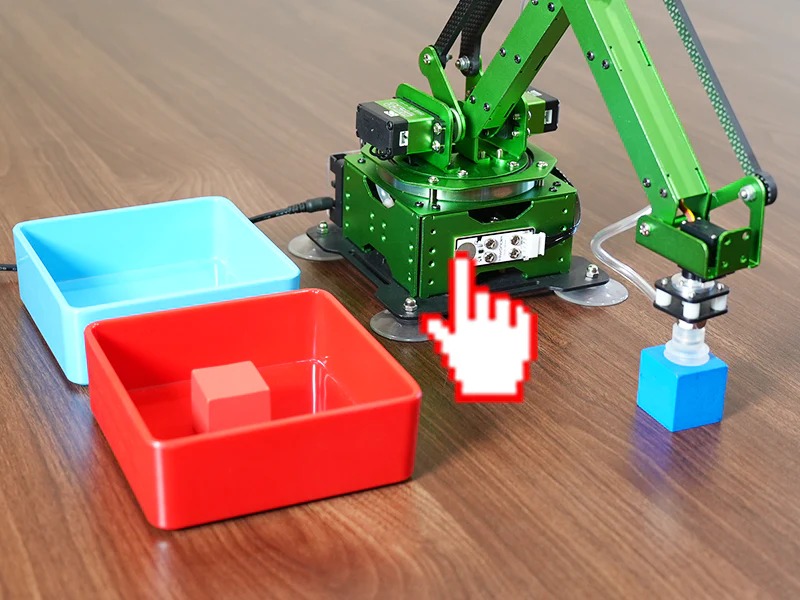
Ordinamento dei colori
Con il sensore di colore, MaxArm può riconoscere e ordinare i blocchi del colore target.
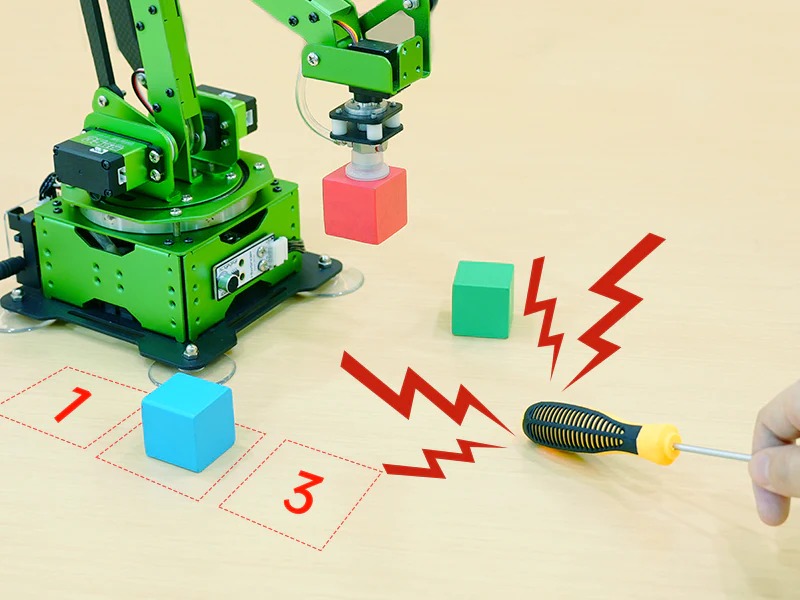
Controllo del suono intelligente
Con il sensore sonoro, MaxArm posiziona i blocchi nella posizione corrispondente riconoscendo il numero di colpi.
Estensione della guida scorrevole

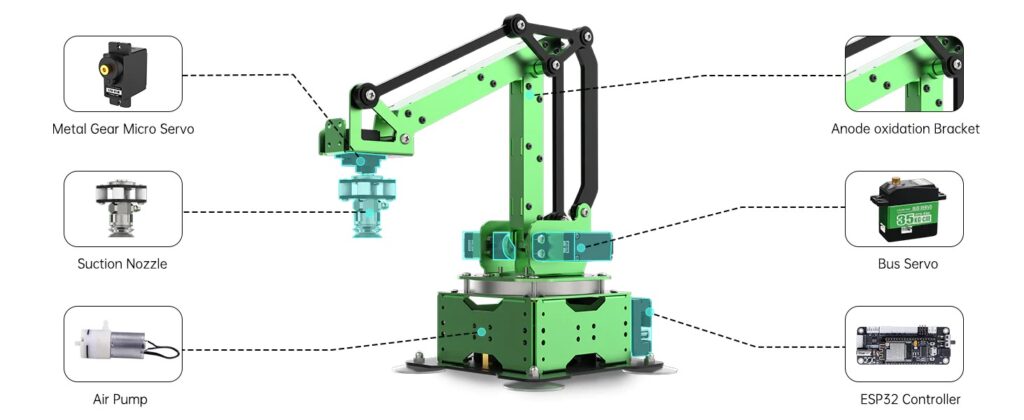
Struttura del prodotto
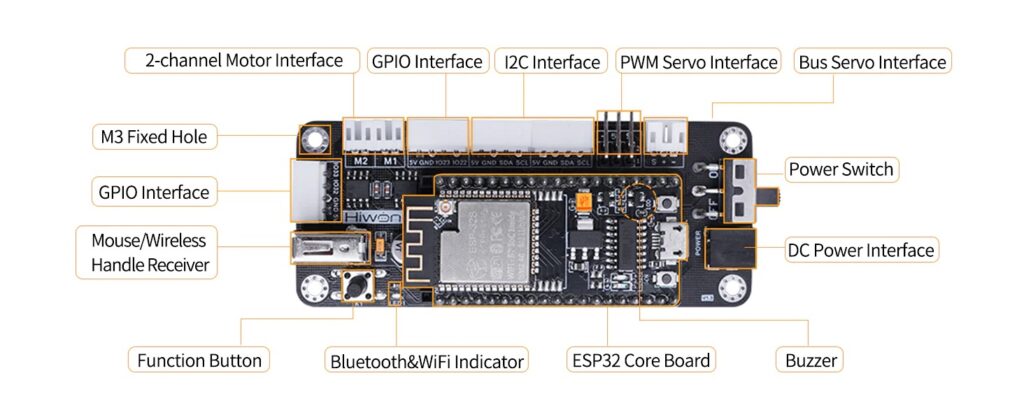
Controller open source ESP32
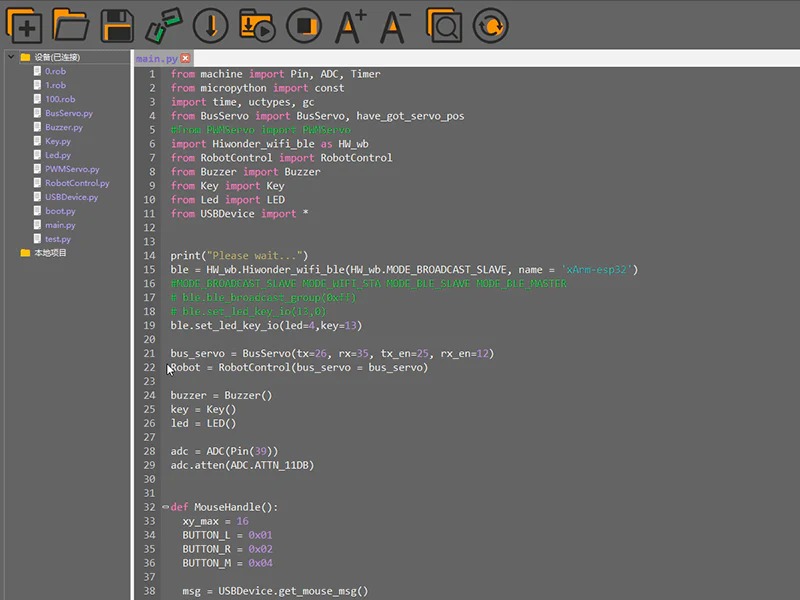
Supporta Python e Arduino
Metodi di controllo multipli




Scarica le risorse e segui le video lezioni
Specifiche tecniche
| Dimensione del prodotto | 158(L) x 160(W) x 260(H) mm |
|---|---|
| Peso | 1.3kg |
| Materiale | Pannello in metallo e fibra di vetro |
| DOF del braccio robotico | 4DOF |
| Alimentazione | Adattatore DC 12V / 5A |
| Sistema di controllo | Controller open source ESP32 |
| Software | PC software, iOS/ Android APP |
| Metodo di comunicazione | WiFi & Bluetooth |
| Servo | Servo bus HTS-35H e micro servo LFD-01M |
| Metodo di controllo | Controllo computer/telefono/maniglia wireless/mouse |
| Dimensioni confezione | 298(L) x 210(W) x 175(H) mm |
| Peso confezione | Circa 2kg |
| Starter kit | 1 x Braccio robotico (assemblato) |
| Kit standard | 1 x Kit iniziale |
| Kit avanzato | 1 x Kit standard |
| Developer kit | 1 x Kit avanzato |